استپ موتور چیست و چه تفاوتی با سروو موتور دارد

استپ موتور و سروو موتور، دو نوع از مهمترین محرکهای الکتریکی در صنایع مدرن و اتوماسیون هستند که برای کنترل دقیق موقعیت و حرکت مورد استفاده قرار میگیرند. درک تفاوت کلیدی بین این دو موتور برای انتخاب بهینه در پروژه صنعتی، رباتیک، پرینتر سه بعدی و ماشین آلات CNC ضروری است تا از صرف هزینه اضافی و عملکرد نامطلوب جلوگیری شود. این مقاله به بررسی جامع، مقایسه دقیق و ارائه راهنمای انتخاب کاربردی بین استپ موتور و سروو موتور خواهد پرداخت.
جدول محتوا
استپ موتور چیست؟
در پاسخ به پرسش متداول استپ موتور چیست ابتدا باید معنای لغوی آن را بدانید. استپ موتور به معنای موتور پلهای است. نوعی موتور براشلس (بدون جاروبک) DC که یک چرخش کامل را به تعدادی پله یا گام مساوی تقسیم میکند. این موتور با تبدیل پالس الکتریکی به حرکت زاویهای گسسته و دقیق، حرکت میکند. هر پالس ورودی به درایو استپ موتور، روتور را به اندازه یک گام مشخص حرکت خواهد داد. این ویژگی باعث شده است که کنترل موقعیت استپ موتور بسیار ساده و بدون نیاز به سیستم فیدبک در حالت حلقه باز انجام شود.
اصول عملکرد استپر موتور
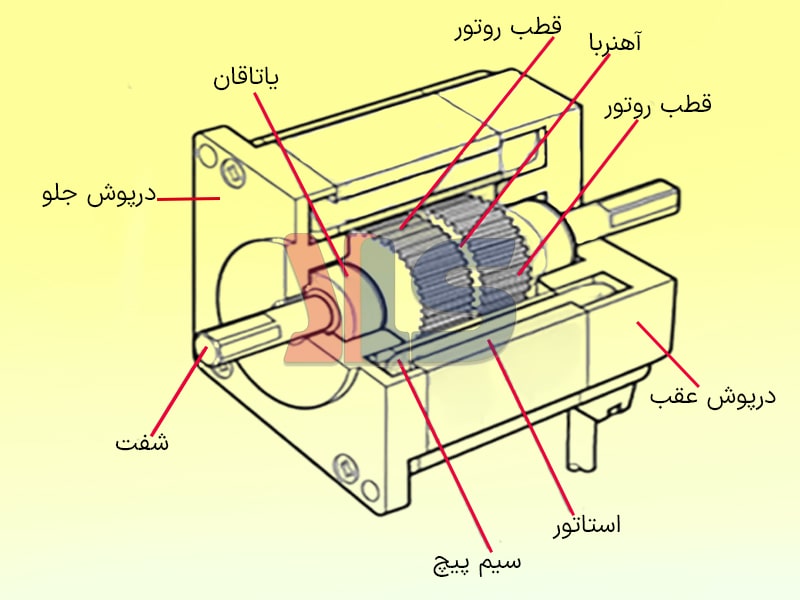
ساختار داخلی استپ موتور شامل یک روتور دندانهدار و یک استاتور با چندین سیم پیچ است. با فعال و غیرفعال کردن متوالی سیم پیچهای استاتور در یک توالی خاص، میدان مغناطیسی دوار ایجاد شده و روتور پله به پله حرکت خواهد کرد. مفهوم گام یا پله (Step Angle) به کوچکترین حرکت زاویهدار روتور به ازای هر پالس اشاره دارد. هرچه زاویه گام کوچکتر باشد، دقت موقعیتیابی موتور بیشتر خواهد بود. درایو استپ موتور مسئول تولید پالس الکتریکی دقیق و کنترل جریان سیم پیچ برای حرکت صحیح موتور است.
مزایا و نقاط قوت استپ موتور چیست
- سادگی کنترل و نصب: استپ موتور در حالت حلقه باز نیازی به فیدبک ندارد و راهاندازی آن نسبتا ساده است.
- قیمت اولیه مقرون به صرفه: معمولا هزینه اولیه خرید استپ موتور و درایو آن کمتر از سروو موتور است.
- گشتاور نگهدارنده بالا: استپ موتور حتی در حالت سکون و بدون چرخش، گشتاور نگهدارنده بسیار بالایی دارد که امکان حفظ موقعیت دقیق بار را بدون نیاز به ترمز مکانیکی فراهم میکند.
- پایداری موقعیت: پس از توقف، موتور موقعیت خود را به خوبی حفظ خواهد کرد.
مشاهده قیمت اچ ام ای
معایب و محدودیتهای استپر موتور
- کاهش گشتاور با افزایش سرعت: یکی از مهمترین محدودیتهای استپ موتور، افت شدید گشتاور با بالا رفتن سرعت است.
- احتمال از دست دادن گام: تحت بار سنگین، شتابگیری ناگهانی یا رزونانس در سرعت خاص، استپ موتور ممکن است گامهایی را از دست بدهد. در سیستم حلقه باز، این خطا توسط سیستم تشخیص داده نمیشود و منجر به از دست دادن کنترل موقعیت واقعی میشود.
- تولید گرما و لرزش: استپ موتور حتی در حالت سکون نیز مصرف جریان دارد که منجر به تولید گرما خواهد شد . همچنین در سرعت خاص ممکن است لرزش و رزونانس ایجاد کند.
- بازدهی انرژی پایینتر: به دلیل مصرف جریان مداوم، بازدهی انرژی استپ موتور کمتر از سروو موتور است.
کاربردهای رایج استپ موتور چیست
با توجه به مزایا و محدودیتها، این نوع محرک در کاربردهایی که نیاز به دقت متوسط، سرعت پایین تا متوسط و بار نسبتا سبکی دارند، بسیار محبوب است. از جمله این کاربردها میتوان به پرینتر سه بعدی، دستگاه برش لیزر و حکاکی سبک، ماشین آلات CNC کوچک و رومیزی، دستگاه بستهبندی با سرعت پایین، تجهیزات پزشکی و آزمایشگاهی مانند پمپ تزریق و سیستم موقعیتیابی ساده و دقیق اشاره کرد.
سروو موتور و عملکرد آن و کاربرد در صنعت
سروو موتور نوعی موتور است که به همراه یک سیستم فیدبک و یک سروو درایو برای ایجاد یک سیستم حلقه بسته عمل میکند.
سیستم سروو موتور دارای سه قسمت اصلی است: موتور، انکودر و سروو درایو. انکودر وظیفه اندازهگیری موقعیت و سرعت لحظهای شفت را برعهده دارد و سروو درایو با مقایسه موقعیت واقعی با موقعیت مطلوب توسط کنترلر اصلی، خطاهای موجود را تشخیص داده و جریان موتور را تنظیم میکند.
از سروو موتور در صنایع گوناگونی نظیر ربات صنعتی پیشرفته، بازو رباتیک دقیق، ماشین آلات CNC سنگین و دقیق، صنایع خودروسازی و هوافضا و … استفاده میشود.
مقایسه قیمت و خرید اینورتر
مزایا و معایب سروو موتور
مزایای استفاده از سروو موتور:
- دقت بالا و عدم از دست دادن پالس
- حفظ گشتاور یکنواخت در سرعت بالا
- پاسخگویی سریع دینامیکی
- بازدهی انرژی بالاتر
- عملکرد نرم و بیصدا
محدودیتهای سروو موتور:
- قیمت اولیه بالاتر
- پیچیدگی بیشتر در نصب و راهاندازی
- نیاز به نگهداری و کالیبراسیون انکودر
- عدم توانایی در نگهداشتن گشتاور کامل در حالت سکون
مقایسه جامع استپ موتور و سروو موتور
آیا میدانید تفاوت سروو موتور با استپ موتور چیست. برای درک عمیقتر تفاوت استپ موتور و سروو موتور به موارد و نکات بیشتری توجه کنیم:
- مکانیزم کنترل
استپ موتور سنتی معمولا در حالت حلقه باز (Open-Loop) به فعالیت مشغول است. این بدان معناست که سیستم کنترلی پالس را به موتور ارسال کرده و فرض بر این است که موتور دقیقا به همان اندازه حرکت کرده است.
در مقابل، سروو موتور همیشه در سیستم حلقه بسته (Closed-Loop) فعالیت دارد. با وجود یک انکودر که موقعیت و سرعت لحظهای را اندازهگیری کرده و به درایو بازخورد میدهد، سروو موتور قادر است خطاهای موقعیتی را شناسایی و تصحیح کند.
- دقت و قابلیت اطمینان
استپ موتور دقت موقعیتیابی خوبی در حد گامهای تعریف شده خود ارائه میدهد، اما به دلیل عدم وجود فیدبک، در صورت از دست دادن پله تحت بار سنگین، سیستم از موقعیت واقعی بیاطلاع خواهد ماند که منجر به خطای انباشته خواهد شد.
سروو موتور به دلیل مکانیزم حلقه بسته و تصحیح مداوم خطا توسط انکودر، دقت بسیار بالاتری در کنترل موقعیت دارد و احتمال از دست دادن پالس در آن تقریبا صفر است که قابلیت اطمینان سیستم را به شدت افزایش میدهد.
- سرعت و گشتاور
یکی از تفاوتهای عمده، رفتار گشتاور در سرعتهای مختلف است. استپ موتور گشتاور نگهدارنده بسیار بالایی در حالت سکون و سرعت پایین دارد اما با افزایش سرعت گشتاور افت کرده و در سرعت بالا کارایی بسیار کمی دارد.
سروو موتور قادر است گشتاور یکنواخت و قابل توجهی را در طیف وسیعی از سرعت حفظ کند.
- قیمت و هزینه کلی
از نظر قیمت اولیه، استپ موتور معمولا مقرون به صرفهتر از سروو موتور است. ساختار ساده و عدم نیاز به انکودر و درایو پیچیده، هزینه تولید آن را کاهش داده است. اما در نظر گرفتن هزینه کلی نصب، راهاندازی و نگهداری نیز مهم است.
با وجود اینکه نصب استپ موتور ساده است، برای کاربردهایی با نیاز بالا به سرعت و دقت، انتخاب سروو موتور، هرچند گرانتر، میتواند در بلند مدت منجر به بازدهی و صرفهجویی در هزینه عملیاتی شود.
- پیچیدگی نصب و راهاندازی
نصب و راهاندازی استپ موتور نسبتا ساده است. کافی است موتور، درایو و کنترل کننده پالس را به یکدیگر وصل کنید و تنظیمات اولیه را انجام دهید.
سروو موتور به دلیل مکانیزم حلقه بسته و نیاز به تیونینگ پارامترهای کنترل PID برای بهینهسازی عملکرد، پیچیدگی بیشتری در راهاندازی و تنظیم دارد و نیاز به مهارت فنی بیشتری نیز دارد.
- نگهداری و تعمیرات
نگهداری از استپ موتور نیز تا حد زیادی آسان است. چون فاقد انکودر است و نیاز به کالیبراسیون خاصی ندارد.
ولی سروو موتور به علت داشتن انکودر و نیاز به کالیبراسیون، به بررسی دورهای، تمیز کردن انکودر و بازبینی تنظیمات نیازمند است که به تبع آن، هزینه نگهداری بالایی نیز دارد.
- منبع تغذیه
اکثر استپ موتورها با منبع تغذیه DC کار میکنند.
در حالی که سروو موتور در هر دو نوع AC و DC موجود است.
- بازدهی انرژی و تولید گرما
استپ موتور به دلیل مصرف جریان حتی در حالت سکون، بازدهی انرژی کمتری دارد و تولید گرمای زیادی را نیز دارد.
سروو موتور جریان را متناسب با بار مصرف کرده و منجر به بازدهی انرژی بیشتر و گرمای کمتر میشود.
- پاسخگویی و شتاب
استپ موتور پاسخ آنی به پالس ورودی دارد و برای شروع و توقف سریع در حرکت پلهای مناسب است.
اما سروو موتور پاسخگویی دینامیکی بسیار سریعتر و توانایی شتابگیری و کاهش شتاب ناگهانی بالاتری دارد.
ملاحظات مهم در انتخاب و جایگزینی
انتخاب موتور مناسب برای پروژه، یکی از مهمترین تصمیماتی است که میتواند بر عملکرد، هزینه و طول عمر سیستم تأثیر بگذارد. هیچ موتوری به طور مطلق بهترین نیست؛ بلکه مناسبترین موتور با توجه به نیاز خاص پروژه انتخاب میشود.
تحلیل نیاز پروژه، گام اول انتخاب
قبل از انتخاب بین استپ موتور و سروو موتور، باید به دقت نیاز پروژه خود را تحلیل کنید:
- میزان دقت مورد نیاز: آیا پروژه به دقت بسیار بالایی در کنترل موقعیت نیاز دارد (مانند 0.001 میلیمتر)، یا خطاهای جزئی قابل چشمپوشی اند؟
- حداکثر سرعت و شتاب: آیا سیستم نیاز به سرعت بسیار بالا (چند هزار دور بر دقیقه) یا تغییرات شتاب ناگهانی دارد؟
- میزان بار و نوع حرکت: بار اعمالی بر موتور چقدر است؟ حرکت مداوم است یا ضربهای و نیازمند موقعیتیابی دقیق؟
- بودجه و ملاحظات اقتصادی بلندمدت: هزینه اولیه چقدر اهمیت دارد؟ آیا سرمایهگذاری بیشتر در ابتدا منجر به صرفهجویی در نگهداری یا افزایش بازدهی در بلندمدت میشود؟
- محیط کاری: آیا موتور در محیطی با لرزش، دما یا رطوبت خاص کار میکند؟
آیا میتوان استپر موتور را جایگزین سروو موتور کرد؟ (و بالعکس)
در برخی موارد، با در نظر گرفتن محدودیت، امکان جایگزینی وجود دارد، اما همیشه منطقی یا عملی نیست. جایگزینی یک سروو موتور با استپ موتور معمولاً با هدف کاهش هزینه انجام میشود، اما باید از کاهش کارایی یا بروز مشکلات عملیاتی آگاه بود.
مشاهده خرید سروو موتور هایتک
نتیجه گیری
انتخاب بین استپ موتور و سروو موتور یک تصمیم حیاتی در طراحی سیستمهای اتوماسیون صنعتی و رباتیک است. هر دو نوع موتور محرکهای قدرتمندی برای کنترل موقعیت دقیق هستند، اما ویژگیها، مزایا، معایب و کاربردهای متفاوتی دارند.
به طور خلاصه، هیچ موتور “بهتری” وجود ندارد؛ بلکه “مناسبترین” موتور بر اساس نیازهای منحصر به فرد پروژه و ملاحظات فنی و اقتصادی انتخاب میشود:
- اگر پروژهتان نیاز به دقت متوسط، سرعت پایین تا متوسط، بارهای سبک تا متوسط، و بودجه محدود دارید و سادگی کنترل اولویت شماست، استپ موتور گزینه منطقی و بهینهتری خواهد بود.
- اگر پروژهتان نیازمند دقت بسیار بالا، سرعت و شتاب بالا، توانایی تحمل بارهای سنگین، پاسخگویی دینامیکی سریع و کنترل موقعیت بینقص است، و عملکرد بر هزینه ارجحیت دارد، سروو موتور انتخاب برتر خواهد بود.
در نهایت، برای پروژههای پیچیدهتر و حساس، توصیه میشود با متخصصین و مهندسین مشورت کنید تا با تحلیل دقیق پارامترها و نیازها، بهترین و کارآمدترین سیستم محرک را انتخاب نمایید. همچنین، بررسی گزینههایی مانند استپ موتور انکودردار میتواند پلی بین نیازهای عملکردی و محدودیتهای بودجهای شما باشد.
سوالات متداول
آیا استپ موتور انکودردار میتواند در تمامی کاربردها جایگزین سروو موتور شود؟
خیر، استپ موتور انکودردار با وجود بهبود دقت، در سرعتهای بسیار بالا و پاسخگویی دینامیکی سریع به پای سروو موتور واقعی نمیرسد و نمیتواند در تمامی کاربردها جایگزین آن شود.
تفاوت درایورهای رایج برای استپ موتور چیست؟
درایورهای استپ موتور وظیفه تبدیل پالسهای فرمان به جریان مناسب سیم پیچ موتور را دارند و بسته به تکنولوژی کنترل به چند دسته تقسیم میشوند. FULL STEP DRIVER، HALF STEP DRIVER
چگونه میتوان از از دست دادن پله در استپ موتور حلقه باز جلوگیری کرد؟
برای جلوگیری از از دست دادن پله در استپ موتور حلقه باز، باید اطمینان حاصل کرد که موتور تحت بار بیش از حد قرار نگیرد، شتابگیری و کاهش شتاب با احتیاط انجام شود و از سرعتهای رزونانس موتور پرهیز شود.
آیا هزینه نگهداری و تعمیرات سروو موتور در بلندمدت بسیار بیشتر از استپر موتور است؟
بله، به دلیل پیچیدگی بیشتر سروو موتور (انکودر، درایو پیشرفته) نیاز به کالیبراسیون و احتمال نیاز به تعمیرات تخصصیتر، هزینه نگهداری و تعمیرات آن در بلندمدت معمولاً بیشتر از استپ موتور است.
در یک پروژه رباتیک خانگی با بودجه محدود، کدام موتور (استپر یا سروو) انتخاب بهتری خواهد بود؟
در یک پروژه رباتیک خانگی با بودجه محدود، استپ موتور به دلیل قیمت کمتر و سادگی کنترل، معمولاً انتخاب بهتری است، مگر اینکه نیاز به دقت یا سرعت بسیار بالا باشد.
دقت 0.005 درجه در استپر موتور و 0.02 درجه در سروو موتور به چه معناست و کدام یک واقعاً دقیقتر عمل میکند؟
دقت 0.005 درجه در استپ موتور به معنی اندازه گام بسیار کوچک آن است، اما سروو موتور با دقت 0.02 درجه (یا کمتر) و مکانیزم فیدبک، به طور مداوم موقعیت خود را تصحیح میکند و در عمل، دقت واقعی و قابلیت اطمینان بالاتری در کنترل موقعیت ارائه خواهد داد.