
سروو موتور چیست
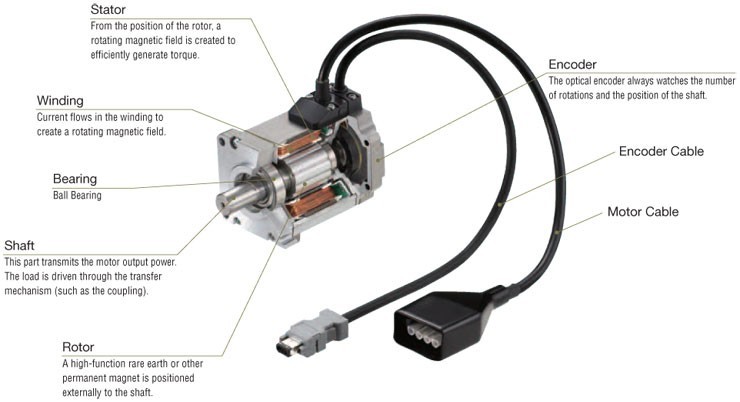
یک سیستم سروو شامل 2 قسمت اصلی سروو موتور و سروو درایو است. برق سروو موتور از طریق کابل پاور یا کابل قدرت از درایو تامین میشود. همچنین دیتای انکودر با استفاده از کابل انکودر به درایو سروو منتقل میگردد. بنابراین هر دو این کابلها از ملزومات مورد نیاز برای راه اندازی سیستم سروو است.
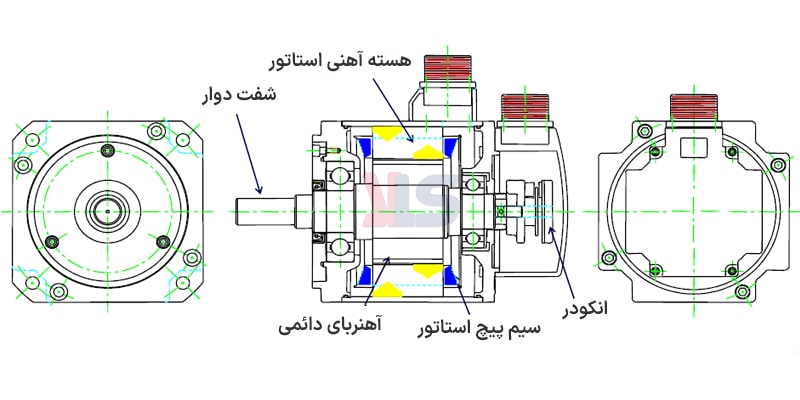
ساختمان داخلی سرو موتور از دو قسمت اصلی تشکیل میشود، قسمتی که محرک بار است که از سیم پیچ و آهن ربا تشکیل شده و قسمتی که موقعیت موتور را تشخیص میدهد مانند انکودر. در یک سیستم سروو موقعیت حرکت، سرعت و یا گشتاور متناسب با مقدار تنظیم شده کنترل میشود.
در سروو موتور AC نیروی مغناطیسی توسط آهنربای دائمی ایجاد میشود و جریان برای تولید گشتاور استفاده میشود. بنابراین گشتاور و راندمان بالا با جریان کم و اندازه کوچک تامین میشود. این دستگاه جاروبک ندارد، بنابراین صدا و لرزش کمی دارد و کنترل با دقت بالا با استفاده از انکودر دقیق امکان پذیر است.
استاتور متشکل است از هسته و سیمپیچ که گشتاور تولید میکند. فناوریهای جدید در راستای قرار دادن حداکثر سیمپیچ ممکن با هسته آهنی در مساحت مساوی قدم برداشته اند. با پیشرفت فناوریهای شکلدهی و سیمپیچی(هسته تقسیمشده/سیمپیچ متمرکز) سیمپیچ بیشتری در یک سطح مساوی قرار میگیرد. طراحی با استفاده از فناوری FEM برای به حداقل رساندن ریپل گشتاور یا گشتاور دندانهای رایج شده است. این فناوری ها سبب کوچکتر شدن سایز سروو موتور شده است.
روتور از شفت، هسته و آهنربای دائمی تشکیل شده است. روتور میتواند بسته به عملکرد آهنربای دائمی، در اندازه یکسان، توان بالایی تولید کند. بنابراین انتخاب و بهکارگیری آهنربای دائمی مناسب، بسیار ضروری است.

یک سیستم سرو بصورت حلقه بسته حرکت موتور را کنترل میکند. موقعیت، سرعت یا گشتاور سروو موتور به درایو برگشت داده میشود و این مقادیر با مقادیر پیش فرض و تنظیم شده مقایسه میگردد. سپس سروو درایو با اطمینان از این اطلاعات، عملکرد سروموتور را در زمان واقعی تصحیح میکند.
این چرخه فیدبک، تشخیص خطا و تصحیح، سیستم کنترل بسته نامیده میشود. معمولا سیستم کنترل با استفاده از سروو درایو به تنهایی و یا به همراه یک کنترلر خارجی نظیر موشن کنترل یا پی ال سی اجرا میگردد. این سیستم کنترل معمولا برای کنترل موقعیت، سرعت و گشتاور مورد استفاده قرار میگیرد.
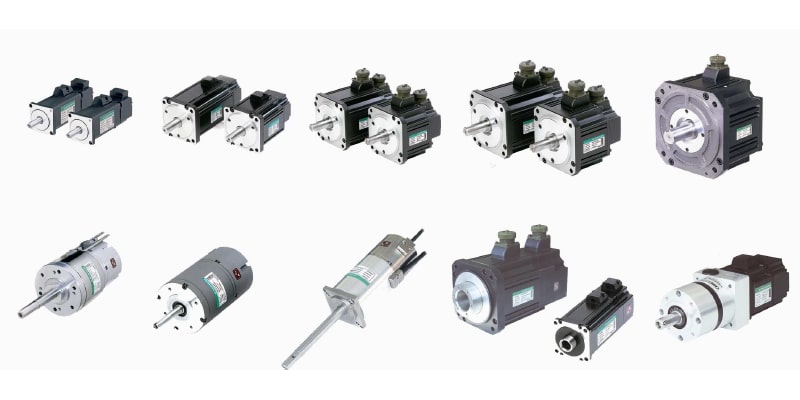
سروو موتور
متداول ترین سروو موتورهای صنعتی، موتورهای بدون جاروبک هستند. روتور دارای یک آهنربای دائمی قدرتمند است. استاتور از چند هسته سیم پیچی شده رسانا تشکیل شده است و هنگامی که سیم پیچ ها به ترتیب مشخص شده فعال می شود، روتور می چرخد. حرکت روتور با فرکانس، فاز، قطبیت و جریان استاتور تعیین میشود.
سروو درایو
سروو درایو بخش غیر قابل انکار یک سیستم سروو است، فرمان حرکت یک سروو موتور بوسیله درایو آن صادر میشود. سروو موتور برخلاف الکتروموتورهای معمولی بدون سرو درایو راه اندازی نخواهد شد، بنابراین در نظر داشته باشید حتما موتور سروو را به همراه سروو درایو مربوطه تهیه نمایید.
سروو درایو با استفاده از دو کابل مجزا به سروموتور متصل میشود، یکی کابل قدرت سه رشته U, V, W است که ولتاژ را به موتور منتقل میکند و دیگری کابل انکودر است که دیتای انکودر سروو موتور را به درایو منتقل میکند.
درایو سروو دستورات لازم را از کنترلر دریافت و گشتاور خروجی، سرعت چرخش و موقعیت موتور را کنترل میکند. موقعیت، سرعت و گشتاور مطابق با فرمان کنترلر بر اساس فیدبک انکودر به سروو درایو ارسال می شود و درایو در زمان مناسب قدرت مورد نیاز را به موتور اعمال میکند. اساس کار سروو درایو همانند اینورتر است، به این صورت که با تبدیل برق AC به DC فرکانس مورد نیاز برای موتور را ایجاد میکند.
انکودر
سرو موتورها به دلیل داشتن انکودر متفاوت از موتورهای معمولی هستند. که این منجر به کنترل دقیق میگردد. انکودر سنسوری است که هسته اصلی یک سیستم سروو را تشکیل میدهد و باعث ایجاد بازخورد سرعت و موقعیت میشود.
انکودر حساس ترین قسمت است و با کوچکترین ضربه به شفت موتور ممکن است دچار آسیب شود. تنظیم انکودر سروو موتور کار تخصصی است و نیازمند ابزار مخصوص است. انکودر به دو نوع تقسیم میشود.
انکودر افزایشی
انکودر افزایشی بر اساس چرخش پالس تولید میکند و معمولا دارای 3 فاز اصلی A، B و Z هست. بر اساس لبه های بالا رونده و پایین رونده فازهای A و B در هر دور پالسها شمارش میشود و فاز Z هم بر اساس هر دور گردش یک پالس تولید میکند. در سروو های با انکودر افزایشی میزان مسافت حرکت از یک نقطه به نقطه دیگر تعریف میشود و موتور به اندازه آن عدد فاصله جلو یا عقب میرود.
معمولا انکودر های افزایشی حداکثر 3000 پالس است که برای چرخش کامل یک دور موتور باید 1200 پالس ارسال شود.
انکودر مطلق
انکودر مطلق نوعی انکودر دقت بالا است که موقعیت را بصورت یک عدد دیجیتال ارسال میکند. انکودر های مطلق در 2 نوع سینگل ترن و مولتی ترن تولید میشوند. انکودر مولتی ترن امکان ذخیره موقعیت را دارد و با قطع برق موقعیت سروو موتور را حفظ میکند. در سرو های با انکودر مطلق نقطه مقصد تعریف میشود و موتور تا رسیدن به نقطه مقصد متوقف نمیشود.
ترمز مکانیکی
عموما برای برخی کاربردها نیاز است تا شفت سروو در حالت عادی قفل باشد تا نیروهای خارجی و اینرسی بار متصل به آن نتواند موقعیت آن را تغییر دهد. در این مواقع از سروو موتور ترمز دار استفاده میشود. در سروو موتور ترمزدار یک بلوک ترمز بین قسمت اصلی و انکودر قرار گرفته است و با ولتاژ 24 ولت DC تحریک میشود. در حالت عادی ترمز مکانیکی شفت را قفل نگاه میدارد و با اعمال ولتاژ به آن شفت را رها میکند. بسیاری از کاربران تصور اشتباهی نسبت به سرو موتور ترمزدار دارند، و در مواجه با این نوع موتور تصور میکنند که ترمز سبب توقف دقیق سروو موتور در نقطه مقصد میشود. با توضیح فوق امیدواریم این برداشت اشتباه از سروو موتور ترمزدار اصلاح شود.
یکی از اصلی ترین کاربرد سروو موتور ترمزدار محور عمودی یا Z است. در محور عمودی وزن بار میتواند شفت موتور را به چرخش درآورد و در صورت قفل نبودن شفت موتور، بار جابجا میشود.
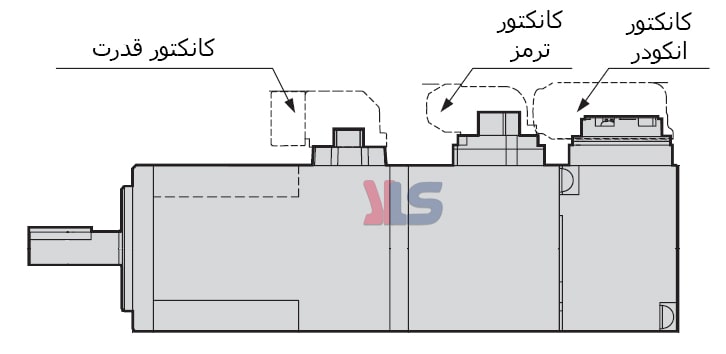
کابل های رابط
برق موتور سروو از طریق درایو تامین میشود، بنابراین نیاز به یک کابل پاور است تا ولتاژ مورد نیاز را به موتور ارسال کند.
همچنین سیگنال انکودر به وسیله کابل انکودر به سروو درایو ارسال میشود.
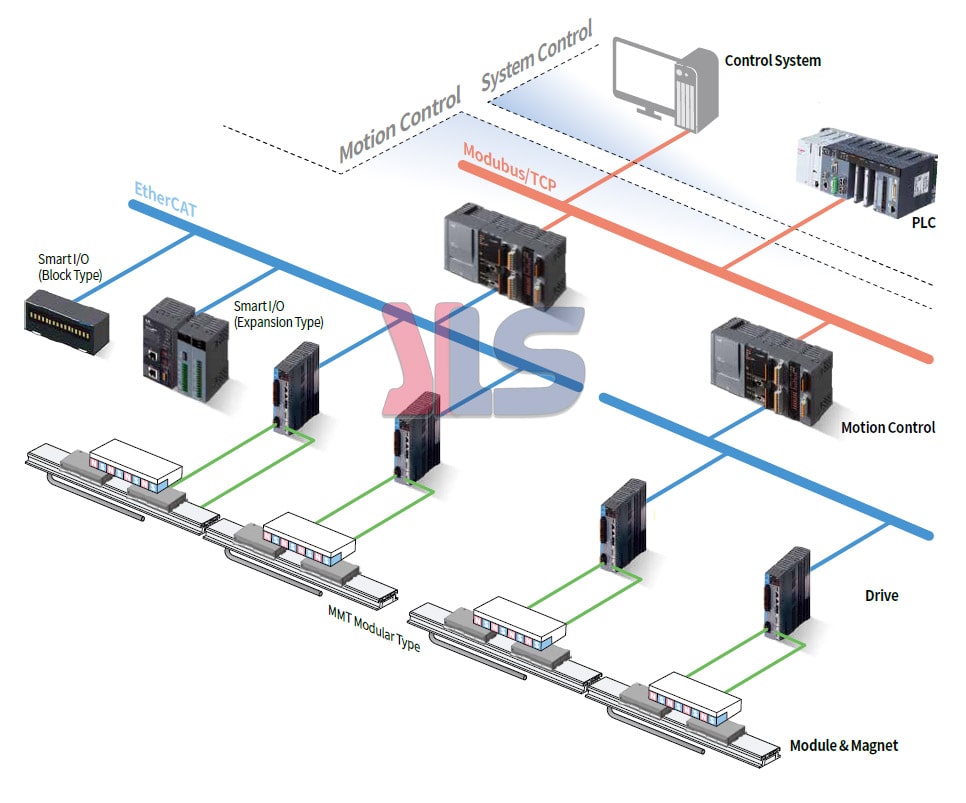
عملکرد کلیه سروو درایو ها یکسان است و با اعمال ولتاژ مورد نیاز سروو موتور را راه اندازی و متوقف میکند. تفاوت اصلی سروو درایوها در نحوه ارتباط و فرمان پذیری از کنترلر و نیاز یا عدم نیاز به کنترلر خارجی نظیر پی ال سی است. برخی از سرو درایو ها دارای کنترل داخلی است و کاربر میتواند بدون نیاز به PLC مقادیر موقعیت و سرعت را به صورت پیش فرض تعریف نماید و بر اساس آن پله های حرکتی را تنظیم نماید. اما در برخی دیگر از درایوها یک موشن کنترل خارجی یا PLC مورد نیاز است.
برخی سروو درایو ها دارای ورودی پالس است و بر اساس پالس دریافتی موتور را کنترل میکنند. اما برخی سرو درایو ها دارای شبکه اترکت و یا کن اوپن هستند و دیتا را با استفاده از کابل شبکه در کنترلر دریافت میکنند.
| مدهای کنترلی سروو درایو | نحوه عملکرد |
| کنترل موقعیت Position Control | کنترل موقعیت با استفاده از پالس صورت میپذیرد |
| کنترل سرعت Speed Control | کنترل سرعت سروو موتور با استفاده از ولتاژ آنالوگ صورت میپذیرد |
| کنترل گشتاور Toque Control | کنترلر گشتاور سروو موتور با استفاده از ولتاژ آنالوگ صورت میپذیرد |
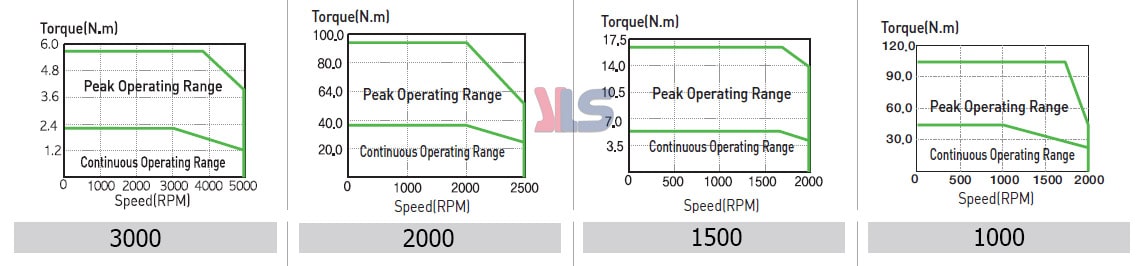
اصلی ترین ویژگی سروو موتور ثبات گشتاور و حفظ گشتاور در دور پایین میباشد. همانطور که در نمودار گشتاور – سرعت مشهود است، گشتاور سرو موتور از ابتدای حرکت تا سرعت نامی ثابت بوده و تنها با گذر از سرعت نامی شروع به کاهش میکند. بنابراین یکی از کاربردهای آن در دستگاه هایی است که مستلزم حرکت با دور پایین بدون افت گشتاور است میباشد.
ویژگی دیگر سروو موتور استهلاک پایین آن نسبت به الکترو موتور معمولی است، یک سروو موتور میتواند در یک سیکل حرکت بارها استارت و استوپ شود و در جهت مختلف راستگرد و چپگرد حرکت کند.
همچنین درجه حفاظت سرو موتورها IP65 به بالا است که سبب میشود تا آنها مناسب کار در محیط های مرطوب بوده و تا حدی در مقابل مایعات نفوذ ناپذیر باشند.






سلام
سنکرون کردن سروو موتور بدون شبکه امکان پذیر است؟